RoPE 相对位置编码解读与外推性研究
RoPE(Rotary Position Embedding)位置编码是大模型中最常见的位置编码之一,是论文 Roformer: Enhanced Transformer With Rotary Position Embedding 提出的一种能够将相对位置信息依赖集成到 self-attention 中并提升 transformer 架构性能的位置编码方式。谷歌的 PaLM 和 Meta 的 LLaMA 等开源大模型都是 RoPE 位置编码。
出发点
在绝对位置编码中,尤其是在训练式位置编码中,模型只能感知到每个词向量所处的绝对位置,无法感知两两词向量之间的相对位置。对于 Sinusoidal 位置编码而言,这一点得到了缓解,模型一定程度上能够感知相对位置。
对于 RoPE 而言,作者的出发点:通过绝对位置编码的方式实现相对位置编码。RoPE 希望 $q_m$ 与 $k_n$ 之间的点积,即 $f(q, m) \cdot f(k, n)$ 中能够带有相对位置信息 m - n。那么如何才算带有相对位置信息呢?只需要能够将 $f(q, m) \cdot f(k, n)$ 表示成一个关于 q、k、m - n 的函数 g(q, k, m - n) 即可,其中 m - n 表示这两个向量之间的相对位置信息。
因此,建模的目标就变成了:找到一个函数 $f_q(q, m) \cdot f_k(k, n)$,使得如下关系成立。
$$
f_q(x_m, m) \cdot f_k(x_n, n) = g(x_m, x_n, m - n) \tag{1}
$$
接下来的目标就是找到一个等价的位置编码方式,使得上述关系成立。
理解 RoPE
二维位置编码
为了简化问题,先假设隐藏层向量是二维的,这样就可以利用二维平面上的向量几何性质进行研究。论文中提出了一个满足上述关系的 f 和 g 的形式。
$$
f_q(x_m, m) = (W_q x_m)e^{im\theta} \
f_k(x_n, n) = (W_k x_n)e^{in\theta} \tag{2}
$$
$$
g(x_m, x_n, m - n) = Re[(W_q x_m) (W_k x_n) * e^{i(m - n)\theta}] \tag{3}
$$
其中,Re 表示复数的实部。苏神借助复数来进行求解,在此我们省略求解过程,直接抛出答案,最终作者得到如下位置编码函数,其中 m 为位置下标,$\theta$ 是一个常数。
$$
f_q(x_m, m)=R_{m} q=\left(\begin{array}{cc}\cos m \theta & -\sin m \theta \ \sin m \theta & \cos m \theta\end{array}\right)\left(\begin{array}{l}q_{0} \ q_{1}\end{array}\right) \tag{4}
$$
在二维空间中,存在一个旋转矩阵 $M(\theta)$(即公式 4 中的 $R_m$),当一个二维向量左乘旋转矩阵时,该向量即可实现弧度为 $\theta$ 的逆时针旋转操作。常量 $\theta$ 可以理解为用来控制旋转的幅度,通常会固定为一个超参数,例如和 Sinusoidal 位置编码的 $\theta$ 一样,设置为 $1/10000^{2i/d}$。

以二维向量 (1, 0) 为例,将其逆时针旋转 45°,弧度为 $\pi / 4$,得到新的二维向量 ($\sqrt{2}/2, \sqrt{2}/2$),向量的模长没有发生改变,仍然是 1。计算过程如下所示:
$$
\left(\begin{array}{cc}\cos \frac{\pi}{4} & -\sin \frac{\pi}{4} \ \sin \frac{\pi}{4} & \cos \frac{\pi}{4}\end{array}\right)\left(\begin{array}{l}1 \ 0\end{array}\right)=\left(\begin{array}{c}\cos \frac{\pi}{4} \ \sin \frac{\pi}{4}\end{array}\right)=\left(\begin{array}{c}\sqrt{2} / 2 \ \sqrt{2} / 2\end{array}\right) \tag{5}
$$
位置编码函数 $f_q(x_m, m)$ 在保持向量 q 的模长不变时,通过旋转矩阵 $M(\theta)$ 将 q 逆时针旋转m $\theta$ 来添加绝对位置信息,这也是旋转位置编码名称的由来。
验证是否融合相对位置信息
进一步验证 RoPE 是否可以通过绝对位置编码的方式来实现相对位置编码。首先,分别对 q 和 k 向量添加 RoPE 位置信息,然后再进行点积:
$$
\begin{array}{l}q_{m} \cdot k_{n}=f_q(x_m, m) \cdot f_k(x_n, n)=\left(R_{m} q\right)^{T} *\left(R_{n} k\right)=q^{T} R_{m}^{T} * R_{n} k \ =q^{T}\left[\begin{array}{cc}\cos m \theta & -\sin m \theta \ \sin m \theta & \cos m \theta\end{array}\right]^{T} *\left[\begin{array}{cc}\cos n \theta & -\sin n \theta \ \sin n \theta & \cos n \theta\end{array}\right] k \ =q^{T}\left[\begin{array}{cc}\cos m \theta & \sin m \theta \ -\sin m \theta & \cos m \theta\end{array}\right] *\left[\begin{array}{cc}\cos n \theta & -\sin n \theta \ \sin n \theta & \cos n \theta\end{array}\right] k \ =q^{T}\left[\begin{array}{cc}\cos n \theta \cos m \theta+\sin n \theta \sin m \theta & \sin m \theta \cos n \theta-\sin n \theta \cos m \theta \ \sin n \theta \cos m \theta-\sin m \theta \cos n \theta & \cos n \theta \cos m \theta+\sin n \theta \sin m \theta\end{array}\right] k \ =q^{T}\left[\begin{array}{cc}\cos (n-m) \theta & -\sin (n-m) \theta \ \sin (n-m) \theta & \cos (n-m) \theta\end{array}\right] k \ =q^{T} R_{n-m} k\end{array} \tag{6}
$$
通过公式(6)的推导可知,q 和 k 向量之间的点积是一个关于 q、k、m - n 的函数,所以函数 $f_q(x_m, m)$ 以绝对位置编码的方式融合了相对位置信息。
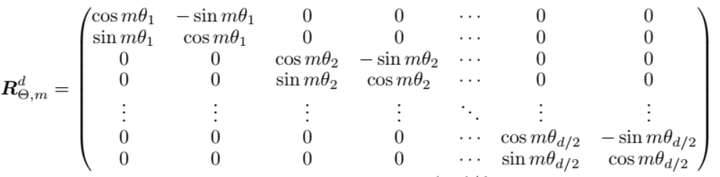
推广到多维
在大模型时代,隐藏层向量的维度通常上千甚至可能上万,如何将二维位置编码的结论推广到多维呢?将二维位置编码的 2 x 2 旋转矩阵扩展到多维,将该矩阵作为对角元素,拼接成一个高维的对角矩阵。最终高维向量的旋转(将高维向量两两分组,每一组内旋转)可表示成如下图所示的公式,左侧是高维向量的旋转矩阵$M(\theta)$。
$$
\left(\begin{array}{ccccccc}\cos m \theta_{0} & -\sin m \theta_{0} & 0 & 0 & \cdots & 0 & 0 \ \sin m \theta_{0} & \cos m \theta_{0} & 0 & 0 & \cdots & 0 & 0 \ 0 & 0 & \cos m \theta_{1} & -\sin m \theta_{1} & \cdots & 0 & 0 \ 0 & 0 & \sin m \theta_{1} & \cos m \theta_{1} & \cdots & 0 & 0 \ \vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots \ 0 & 0 & 0 & 0 & \cdots & \cos m \theta_{d / 2-1} & -\sin m \theta_{d / 2-1} \ 0 & 0 & 0 & 0 & \cdots & \sin m \theta_{d / 2-1} & \cos m \theta_{d / 2-1}\end{array}\right)\left(\begin{array}{c}q_{0} \ q_{1} \ q_{2} \ q_{3} \ \vdots \ q_{d-2} \ q_{d-1}\end{array}\right) \tag{7}
$$
与 Sinusoidal 位置编码一样,有着不同的分量(每一组),如公式(8)所示。
$$
\left(R_{\theta, m}\right){i}=\left[\begin{array}{cc}\cos m \theta{i} & -\sin m \theta_{i} \ \sin m \theta_{i} & \cos m \theta_{i}\end{array}\right], for \ i=1,2, \ldots,\lfloor d / 2\rfloor \tag{8}
$$
这也是为什么 $\theta$ 只需要 d/2 维,因为每个 $\theta_i$ 会用来构建 2 x 2 矩阵作为对角元素,从而构造一个 d x d 的旋转矩阵。
矩阵 $R_{\Theta, m}^d$ 是正交矩阵,它不会改变向量的模长,因此通常来说不会改变原模型的稳定性。
另外,上式中的旋转矩阵十分稀疏,为了节省算力,可以通过下面的方式等效实现:
$$
\left(\begin{array}{c}q_{0} \ q_{1} \ q_{2} \ q_{3} \ \vdots \ q_{d-2} \ q_{d-1}\end{array}\right) \otimes\left(\begin{array}{c}\cos m \theta_{0} \ \cos m \theta_{0} \ \cos m \theta_{1} \ \cos m \theta_{1} \ \vdots \ \cos m \theta_{d / 2-1} \ \cos m \theta_{d / 2-1}\end{array}\right)+\left(\begin{array}{c}-q_{1} \ q_{0} \ -q_{3} \ q_{2} \ \vdots \ -q_{d-1} \ q_{d-2}\end{array}\right) \otimes\left(\begin{array}{c}\sin m \theta_{0} \ \sin m \theta_{0} \ \sin m \theta_{1} \ \sin m \theta_{1} \ \vdots \ \sin m \theta_{d / 2-1} \ \sin m \theta_{d / 2-1}\end{array}\right) \tag{9}
$$
其中 $\theta_i$ 是预定义的参数,通常选择为 $\theta_i = 1/(10000^{(2i / d)})$,这样可以保证不同维度(分量)的旋转频率不同,从而捕获不同尺度的位置信息。
$\theta_i$ 分量的研究
根据 $\theta_i = 1/(base^{(2i / d)})$ 的计算公式(base 通常设置为 10000,与 Sinusoidal 位置编码相同),可知随着 i 的增大,$\theta_i$ 的取值越小,也就是说旋转的角度(频率)越小。i 是维度的索引,从 1 到 d/2,我们一般称较小的 i 为低维度,较大的 i 为高维度。换言之,低维度的旋转角度大(相对于高维度),频率高;高维度的旋转角度小(相对于低维度),频率低。
关于高频、低频与维度和旋转角度的关系可参考 百面LLM-47 - swtheking的文章 - 知乎。
这种设计可以诱导模型在学习时,让隐藏状态(hidden states)的不同维度关注不同范围的依赖关系。模型可以自然地在低维度学习到近距离、局部的依赖,而在高维度学习到远距离、全局的依赖。这种特性是由 RoPE 中$\theta_i$参数随着维度索引 i 的增加而减少所决定。

我们可以绘制 $\theta_i = 1/(base^{(2i / d)})$ 公式的曲线图,可知其本质上是一个 exp(-x) 图,最大值 1 在 i = 0 时取到;随着 i 的增大,函数值逐渐减小,且减少幅度越来越小。
问题:为什么低维度学习到的是近距离的依赖,而高维度学习到的是远距离的依赖?
回答:低维度由于 $\theta_i$ 较大,旋转角度变化快,这使得低维度的隐藏状态对相邻位置的变化更敏感,因此更适合捕捉局部或短距离的依赖关系。高维度随着 $\theta_i$ 减小,旋转角度变化慢,高维度的隐藏状态对距离较远的 token 之间的交互更加敏感,因此更适合捕捉全局或长距离的依赖关系。
因此,后续的一系列改进(例如,NTK-aware RoPE、Dynamic NTK、YaRN 等等)围绕$\theta_i$分量的调整,使 RoPE 相对位置编码能够更好地捕捉到局部依赖关系,从而实现外推的效果。
代码实现
下面将会以 HuggingFace transformers 库的实现为例,代码文件 src/transformers/models/llama/modeling_llama.py。
1 | class LlamaRotaryEmbedding(nn.Module): |
RoPE 的优点
远程衰减
在上文的推导过程中,$\theta$ 是一个超参数、可以是任意常量。那么,$\theta$ 取不同的值会有什么影响?我们不妨将其设置为 1。然后,初始化全一向量 q 和 k(排除向量 q 和 k 在内积计算过程中随机初始化的影响,因此用 torch.ones 进行初始化),将 q 固定在位置 0 上,k 的位置从 0 开始逐步变大,依次计算 q 和 k 之间的内积。
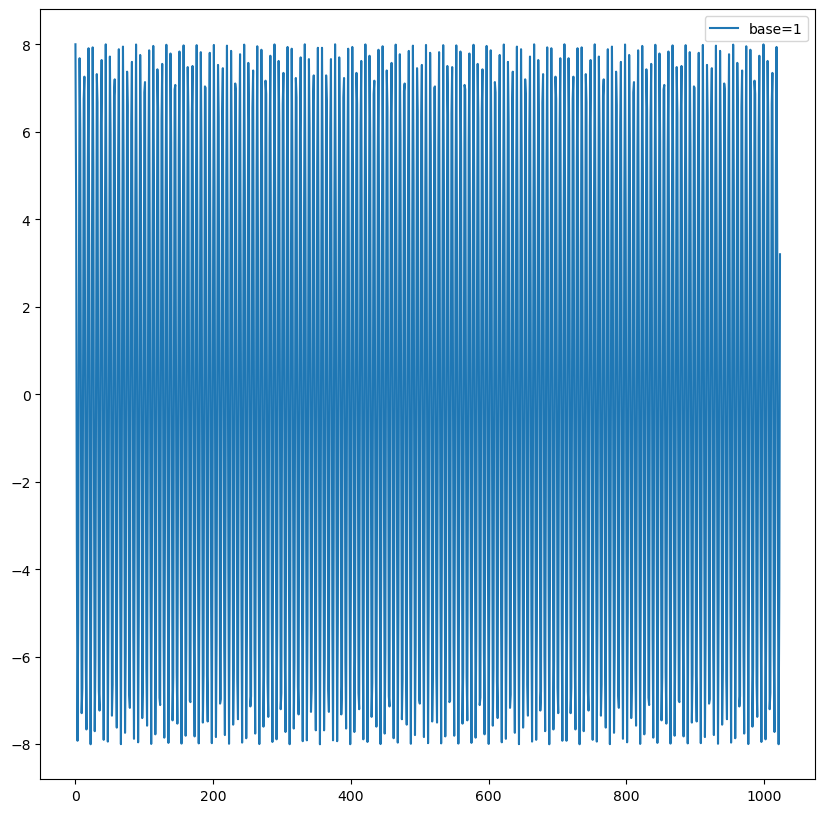
可以发现,随着 q 和 k 的相对距离增加,它们之间的内积分数呈现出一定的震荡特性,缺乏重要的远程衰减性,这并不是我们希望的。
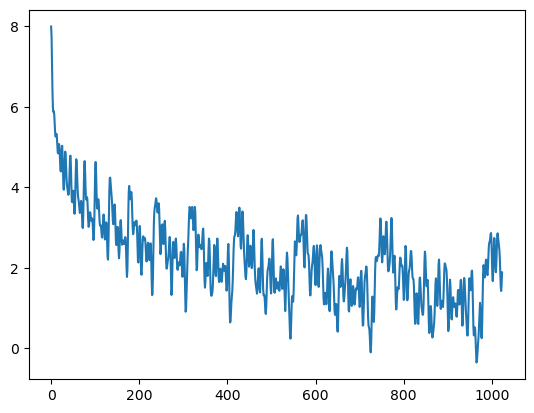
借鉴 Sinusoidal 位置编码,$\theta_i = 10000^{-2i/d}$,重复实验过程:可以发现,随着 q 和 k 向量的相对距离增加,它们之间的内积分数呈现出远程衰减的性质。
问题:$\theta_i$ 一定要取 $\theta_i = 10000^{-2i/d}$ 吗?
继续深入探讨 $\theta_i = base^{-2i/d}$ 中 base 取值的影响。重复上述实验的过程,将 base 取不同值时,q 和 k 向量的内积随着相对位置变化趋势如下图所示:base 的不同取值会影响注意力远程衰减的程度。
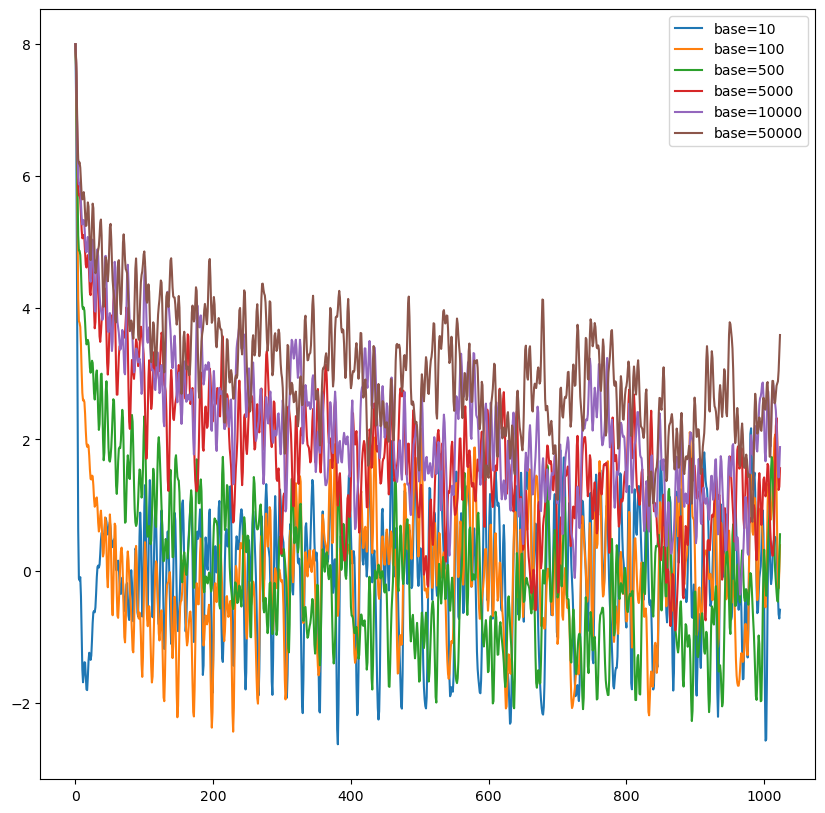
当 base 大于 500 时,随着 base 的提升,远程衰减的程度会逐渐削弱。但太小的 base 也会破坏注意力远程衰减的性质,例如 base = 10 或 100 时,注意力分数不再随着相对位置的增大呈现出震荡下降的趋势。更极端的情况下,当 base = 1 时(第一个实验的图示),将完全失去远程衰减的特性。
结合 **$\theta_i$**分量的研究 这一节内容的研究,当 base 增大时,相同 i 的 $\theta_i$ 值会越来越小。如下图所示,橙色的曲线是 base = 100000 时的 $\theta_i$ 在不同 i 下的值,相比 base = 10000 时,低维度区域下降得更快。

高维度区域由于值过小,在图中难以显示差异,我们可以通过代码进行比较。
1 | def get_theta(dim, base): |
可以看到,除了 i = 0 外,其余分量上 base = 100000 的值都要比 base = 10000 小。高维度区域的差值很小,也就是说调大 base 后,高维特征几乎没有变化,这对于注意力权重的影响几乎可以忽略不计。
对于 base 性质的研究,与大模型的长度外推息息相关,后续的很多方法都是对 base 做操作,从而影响每个位置对应的旋转角度,进而影响模型的位置编码信息,最终达到长度外推的目的。目前大多长度外推的工作都是通过放大 base 以提升模型的输入长度。
脚本:RoPE 远程衰减特性研究
1 | import os |
可用于线性 Attention
线性 Attention是一种简化的 Attention 机制,通过使用核函数来近似标准 Attention 中的 softmax 操作,从而将时间复杂度降低为 $O(n)$。比较常见的线性 Attention 是基于特征映射(feature map)的方法,其中一个特征映射 $\phi$ 被应用到 Q 和 K 矩阵上。
$$
LinearAttention(Q, K, V) = \phi(Q)(\phi(K)^TV) \tag{2}
$$
RoPE 的旋转操作是线性可分的,可以在 $\phi(Q)$ 和 $\phi(K)^T$ 上实现旋转操作,从而加上相对位置信息。
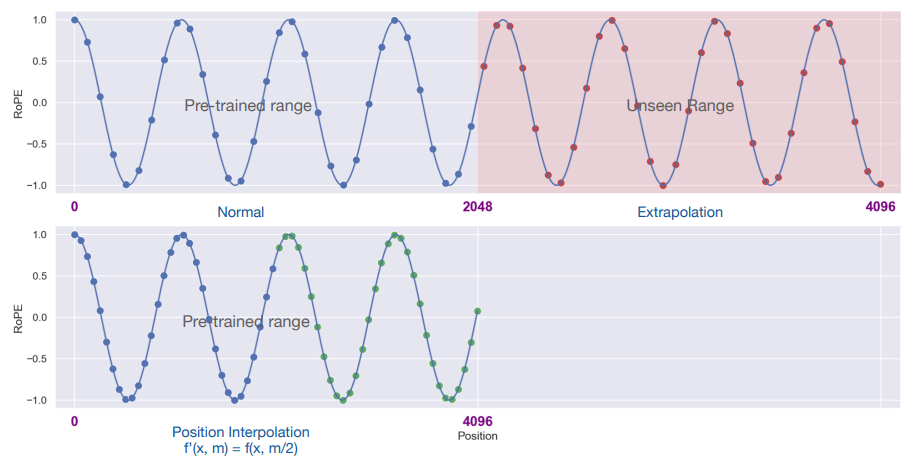
外推效果
虽然 RoPE 理论上可以编码任意长度的绝对位置信息,并且 sin 和 cos 函数计算就能将任意长度的相对位置信息表达出来。但实验发现 RoPE 仍然存在外推问题,即测试长度超过训练长度之后,模型的效果会有显著的崩坏,具体表现为困惑度(PPL)指标显著上升(爆炸)。
参考资料
- 图解 RoPE 旋转位置编码及其特性:https://zhuanlan.zhihu.com/p/667864459
- 再论大模型位置编码及其外推性:https://zhuanlan.zhihu.com/p/675243992